|
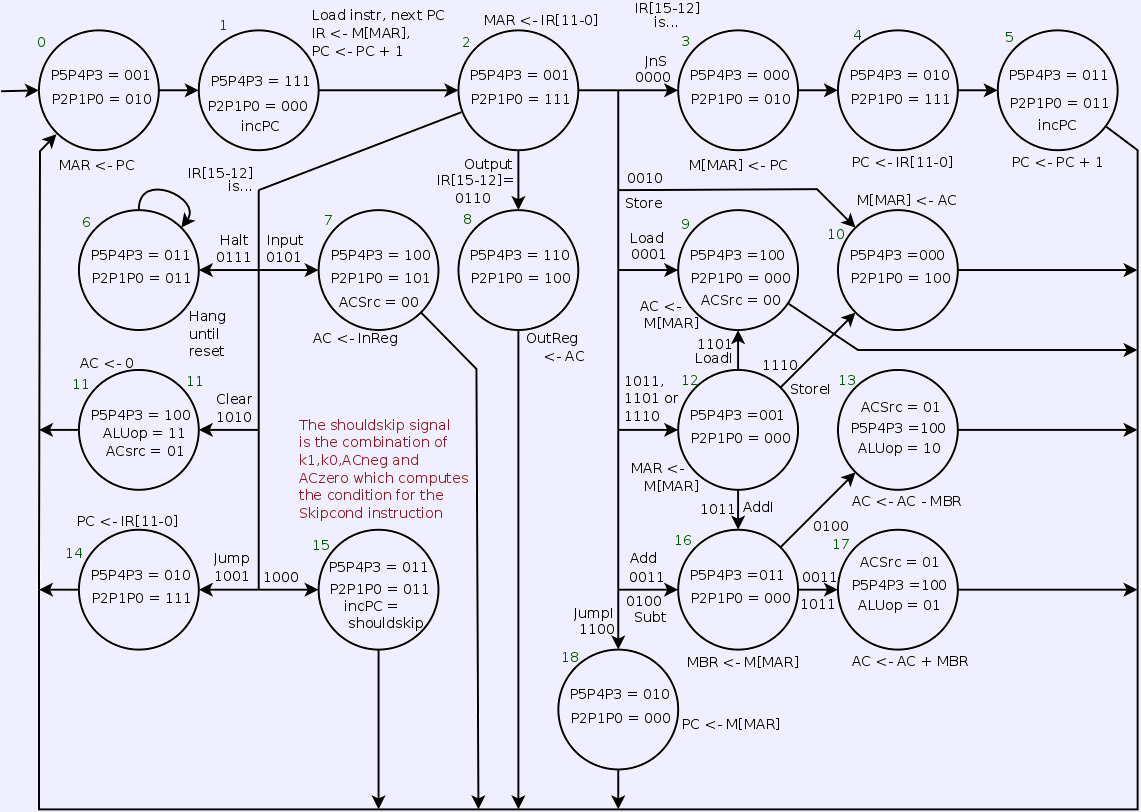
JnS X
[changed]
M[MAR] ← PC
PC ← X
PC ← PC + 1 Load X
[changed]
MAR ← X
AC ← M[MAR] Store X
[changed]
MAR ← X,
M[MAR] ← AC Add X
MAR ← X
MBR ← M[MAR]
AC ← AC + MBR Subt X
MAR ← X
MBR ← M[MAR]
AC ← AC - MBR Input
AC ← InREG Output
OutREG ← AC |
Skipcond
If IR[11-10] = 00 then
If AC < 0 then PC ← PC + 1
else if IR[11-10] = 01 then
If AC = 0 then PC ← PC + 1
else if IR[11-10] = 10 then
If AC > 0 then PC ← PC + 1 Jump X
PC ← IR[11-0] Clear
AC ← 0 AddI X
[changed]
MAR ← X
MAR ← M[MAR]
MBR ← M[MAR]
AC ← AC + MBR JumpI X
[changed]
MAR ← X
PC ← M[MAR] LoadI X
[changed]
MAR ← X
MAR ← M[MAR]
AC ← M[MAR] StoreI X
[changed]
MAR ← X
MAR ← M[MAR]
M[MAR] ← AC |