- Memory hierarchy.

- Smaller, faster on left, larger, cheaper on right.
- Keep recent data in faster storage.
- Create a large, cheap storage system.
- Address Mapping
- Programs refer to memory locations by address.
MOV eax, [ebx]
- The CPU uses addresses to refer to locations in the memory system.
- Only in the simplest systems are these actually the same:
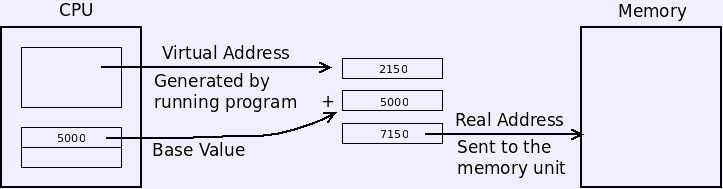
Addresses generated by the program are usually translated by the
CPU before being sent to the memory unit.
- Addresses used by the hardware are real addresses
- Addresses used by the software are virtual addresses
- Each time the program does a store or fetch, the virtual address
is translated to a real address.
- User mode code usually has no way to know what real addresses
exist or how any virtual ones translate.
- The relocation problem.
- For multiprogramming, multiple programs must be loaded into
memory at the same time.
- They will need to occupy different locations on different
occasions.
- Since this location will not be known at compile time, so it must
be possible to relocate a program after compilation.
- Software Relocation.
- Compiler generates object program starting at zero.
- Object format must distinguish pointer values (relative symbols)
from others (absolute symbols).
- When the program is copied from disk to memory, the software
adds its memory location to each relative symbol.
- All addresses are now adjusted and the program can run wherever
it is located.
- Static relocation
- Hardware: Base and Limit Registers
- Compiler (still) generates object program starting at zero.
- On each memory reference, the hardware adds the base address
to the address generated by the instruction.
- User programs are written or compiled to load at address zero.
- The user program has no way to generate addresses which are not
adjusted by the hardware.
- Usually, a limit register is included to trap reference which are
beyond a specified region.
- The user program generally has no access to the base and limit
registers, so it cannot change them or even
tell what its region is.
- Dynamic relocation
- The set of usable memory addresses is an address space.
- Swapping
- If memory is over-committed, some process is removed.
- The image is copied to disk.
- It is returned later after some other process(es) have exited.
- Without hardware relocation, it must be returned to the exact
same location.
- The loaded program doesn't have any markings for absolute or
relative symbols.
- New values have been computed, so the original file won't help.
- Partition Management. The region of memory
occupied by a running program is called a
partition.
- Fixed partitions. Largely obsolete.
- Memory is divided at boot time, and new jobs are placed where they
will fit.
- Waste when jobs are smaller than any available partitions.
- Delay or waste dilemma if the only available partition is too big.
- The waste from this un-needed space is called internal
fragmentation.
- Variable partitions.
- Partitions are created
or destroyed as jobs have need.
- Free partitions can be
kept in a linked list.
- Simply link free blocks together into a list.
- The empty partitions themselves are the nodes, so the space
is “free”.
- Can be expensive to search.
- Finding adjacent free blocks can be expensive.
- Free partitions can be
kept in a map.
- Still requires linear search, though using offsets.
- Space is not free.
- Main advantage: easy to find adjacent groups of free blocks.
- External Fragmentation.
- System tends to accumulate empty
slots too small to use.
- When a new partition is needed, the chance that it fits any
hole exactly is very small.
- If it's a little too big, we put it elsewhere (or can't store
it at all).
- If it's a bit smaller, we create a useless fragment.
- If it's small enough to leave a useful partition, we'll just
create the fragment next time around.
- Compacting is possible (with hardware relocation), but
expensive.
- Internal organization.
- A partition may have extra space to allow for growth.
- Typical to allow the heap and stack to grow together, so we don't have
to predict which will grow more.

- Some architectures will allocate separate partitions for stack and
heap, even though they belong to the same process.